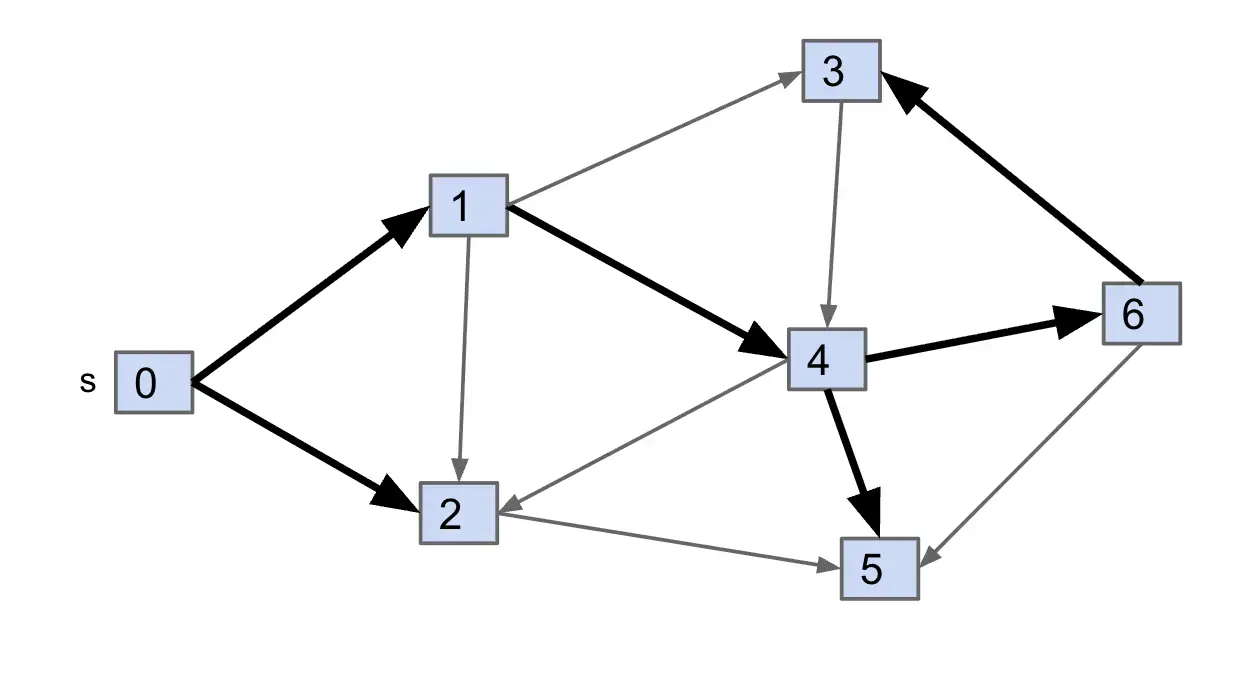
Shortest Paths Tree(SPT)
最短路径树即从源点到所有节点的最短路径,组合起来形成的一棵树
假设从 G 开始,有 V 个节点。
假设每个顶点都是可到达的,则 G 的最短路径树的边永远是 V - 1 个
Dijkstra’s Algorithm
Dijkstra 通常要求边权非负。
核心步骤:
- 每个节点维护两个变量:
distTo:从源点到当前节点的最短距离,初始为∞(源点自身为0)edgeTo:当前最短路径中,该节点是从哪个节点到达的
- 还需要一个 Priority Queue:
- 包含待处理节点,按
distTo的大小维护
- 包含待处理节点,按
- 从源点出发,
- 从优先队列中取出
distTo最小的节点作为当前节点 - 检查当前节点的所有邻居,对邻居进行 “relax” 操作,即试图去更新源点和邻居的最短距离:
新距离 = 当前节点的 distTo + 边的权重- 如果
新距离 < 邻居原本的 distTo:- 将
distTo更新为新距离 - 将
edgeTo更新 - 将该邻居加入 PQ
- 将
- 重复上述步骤,直到 PQ 为空
- 从优先队列中取出
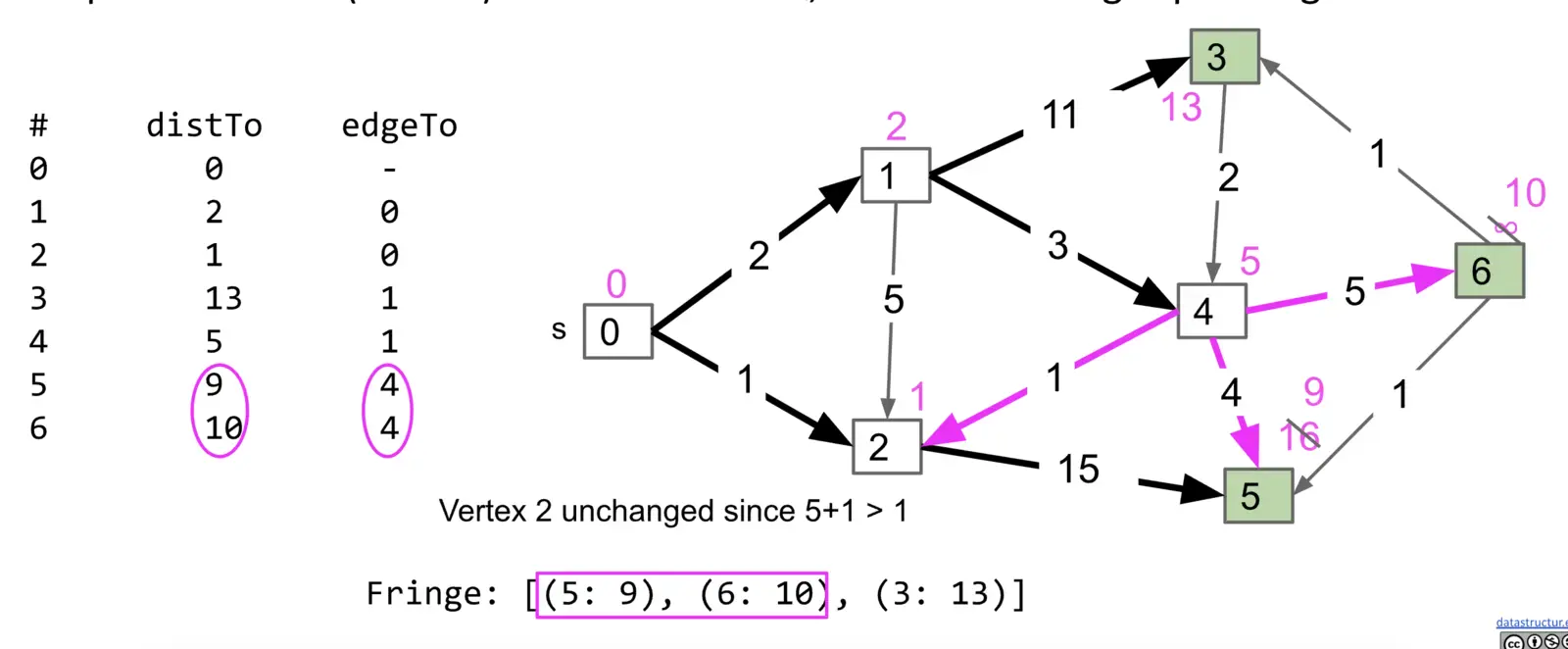
- 例:上图展示了一个更新 4 节点的操作
- 从 4 沿着路径出发,检查它能够到达的所有邻居
- 计算新距离( 4 的
distTo是 5,再加上边的权重)- 4 -> 5:原
distTo为 16,现在是 9,则更新为 9 - 4 -> 6:原
distTo为无限,现在是 10,则更新为 10
- 4 -> 5:原
- 将 5 和 6 加入 PQ
- 计算新距离( 4 的
- 下一步,更新 5 ,因为它的
distTo最小
- 从 4 沿着路径出发,检查它能够到达的所有邻居
A* 算法
A* 和 Dijkstra 实现的异同之处:
- PQ 将不再根据
distTo的大小维护,而是根据distTo + h(v, goal)维护 - 每个节点多维护一个
h(v,goal)变量 - 其余都延续 Dijkstra 算法
核心思想:不只考虑“从起点到当前节点已经走了多远”,还考虑“从当前节点到终点大概还剩多远”
h(v, goal)的含义:
- 这是一个“启发式估计”,它不是实际的距离,就是一个估计距离,
- 例如可以说北京和上海差不多距离 900 公里,但不是实际的精准距离
- 在地图导航的实际应用中,通常以当前地点到目标地点的直线距离作为
h - A* 要保证最优性需要合适的 heuristic;admissible heuristic 要满足不为负且不高估真实最优剩余代价
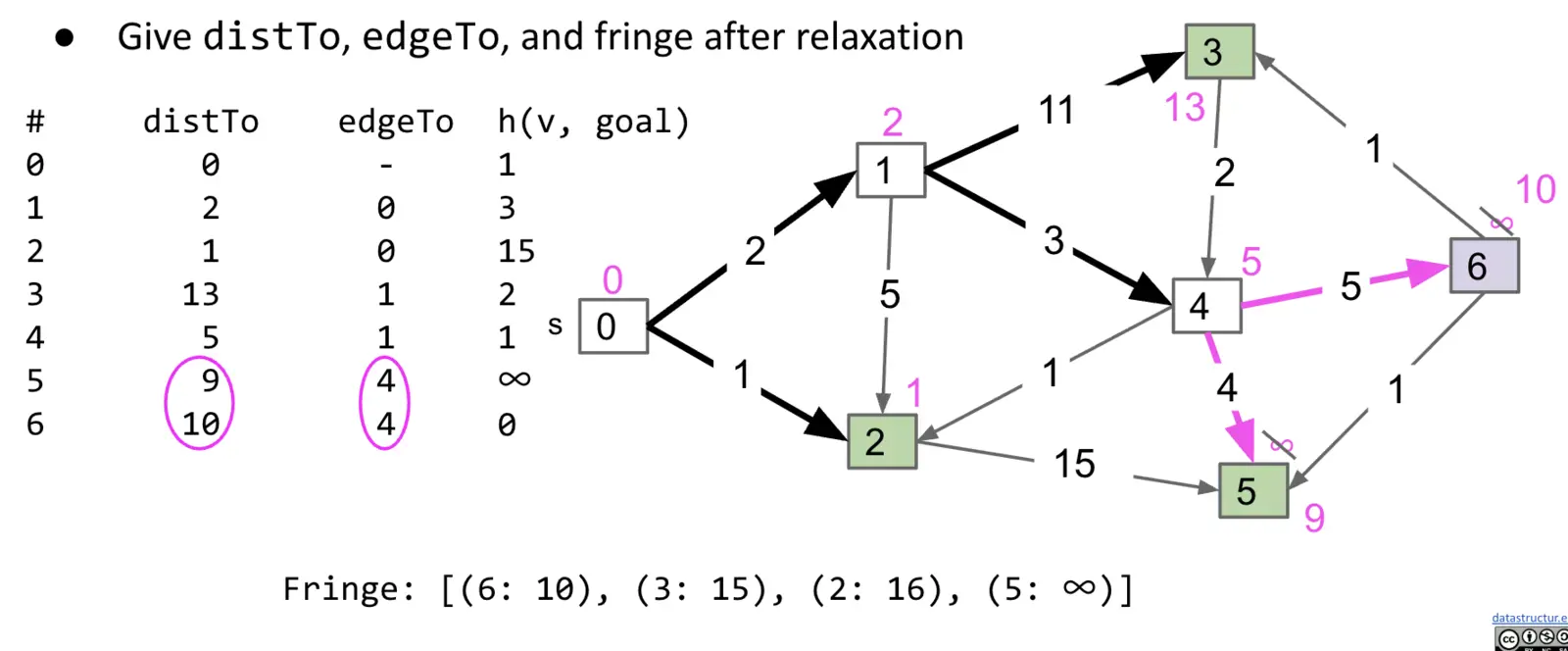
例:上图展示了一个更新 4 节点的操作
- 按照和 Dijkstra 算法完全一样的操作更新了
distTo和edgeTo的值 - 将 5 和 6 加入 PQ,但不再是按照
distTo的大小排列,而是distTo + h(v, goal)